Komplett, programozható digitális időkapcsoló

Korábban készítettem komplett ütemadókat azok számára, akik kevésbé értenek az elektronikához, illetve nem akarnak, vagy nem szeretnének szerelgetéssel foglalkozni. Nekik készült egy kompakt kis eszköz, ami széles körben alkalmazható időzített feladatok ellátására. Ugyan a kereskedelemben is kaphatóak különféle időrelék és időkapcsoló eszközök, viszont azok egy része, ami nagyon olcsó, az általában hamar el is romlik, nem megbízható, vagy nem tesz lehetővé precíz beállítást, időzítést, a drágábbak pedig hát bármennyire jók is, sokba kerülnek és azok többségére sincs egy évnél több garancia, ha esetleg elromlanak, akkor javíttatni nem igazán lehet őket.
A régebben készült ütemadók előállítása viszonylag nehézkes volt, alkatrész és szerelési problémák miatt így csak egy széria készült belőle. Ahogy kifutott az utolsó darab, nem készült újabb belőle, mivel több ponton is át kellett gondolni a kialakítását. Nem is az elektronikai egységgel volt probléma, hanem a burkolatba szereléssel és a külsőségek minőségi kialakításával.
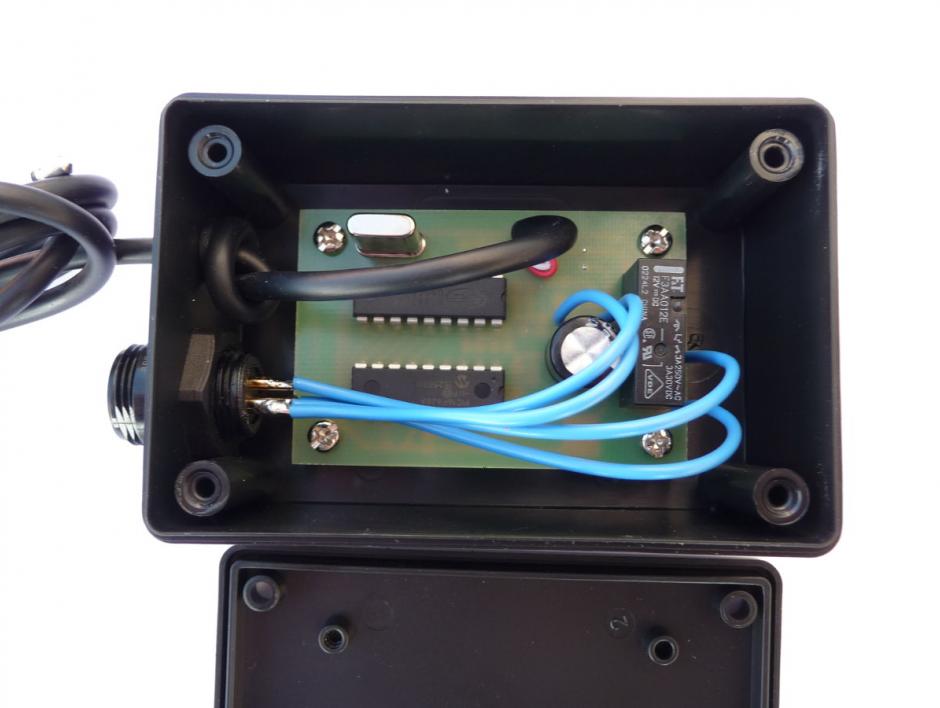
Programozható (vadetető) időzítő modul 4
DSC_3770_1200.jpg
Egyedileg épített szóróegység vezérléséhez, illetve egy már meglévő etetőben tönkrement vezérlőelektronika kiváltására alkalmas az alább bemutatásra kerülő időzítő modul. Az első példány 2012. év januárjában készült egy egyedi megrendelés alapján. A kezdetleges vezérlő az elmúlt évek során több hardveres és szoftveres fejlesztésen esett át, míg végül elérte a jelenlegi állapotot. A fejlesztéseket egyrészt a műszaki paraméterek folyamatos javítása, másrészt a felhasználók visszajelzései, újabb igényei inspirálták.
A modul kialakításának köszönhetően a legtöbb, már meglévő vadetető szóróegységbe beépíthető, illetve ezen túlmenően más célra is felhasználható, ahol naponta szükséges azonos időpontokban elindítani, működtetni valamit. Ilyenek lehetnek például az automatizálható itatók, etetők, öntözőrendszerek, adagoló szerkezetek.